%reload_ext tensorboard
%reload_ext autoreload
Normalising Soft Ambient Flows¶
import os
import time
import math
import torch
import numpy as np
import torch.nn as nn
import pytorch_lightning as pl
import torch.nn.functional as F
import torch.distributions as tdist
import torchdyn.nn.node_layers as tdnl
from joblib import dump, load
from sklearn.decomposition import PCA
from pdmtut.core import GenerativeModel
from pytorch_lightning import loggers as pl_loggers
from regilib.core.distributions import MultivariateNormal
from regilib.core.dynamics.dynamics import RegularisedDynamics
from regilib.core.dynamics.dynamical_state import DynamicalState
from regilib.core.invertible_modules import NormalisingFlow
from regilib.core.invertible_modules.bijective import ContinuousAmbientFlow
store_results = True
load_models = True
Introduction¶
Implementation¶
class NormalisingSoftAmbientFlows(NormalisingFlow, pl.LightningModule, GenerativeModel):
class FunctionDynamics(nn.Module):
def __init__(self):
super().__init__()
self._in_channels = 3
self._out_channels = 3
# expected format: N x (C * L)
# +1 for time, + 1 for noise condition
self.fc1 = nn.Linear(self._in_channels + 2, 64)
self.fc2 = nn.Linear(64, 128)
self.fc3 = nn.Linear(128, 128)
self.fc4 = nn.Linear(128, 64)
self.fc5 = nn.Linear(64, self._out_channels)
@property
def in_channels(self):
return self._in_channels
@property
def out_channels(self):
return self._out_channels
def forward(self, ds):
x = torch.cat([ds.state, ds.condition, ds.t], -1)
x = F.tanh(self.fc1(x))
x = F.tanh(self.fc2(x))
x = F.tanh(self.fc3(x))
x = F.tanh(self.fc4(x))
x = self.fc5(x)
return x
def __init__(self, input_dimensions = 3):
super().__init__(
base_distribution=MultivariateNormal(torch.zeros(3), torch.eye(3)))
# [a,b] interval of standard deviation of noise distribution
self.a, self.b = 0, 0.1
self.input_dimensions = input_dimensions
# state=[l, e, n | state]
self.aug1 = tdnl.Augmenter(augment_dims=3)
self.af1 = ContinuousAmbientFlow(
dynamics=RegularisedDynamics(fdyn=NormalisingSoftAmbientFlows.FunctionDynamics()),
sensitivity='autograd', default_n_steps=5
)
def noise_enhance_data(self, x, c=None, seed=None, perturb_state=True):
ds = x.clone() if isinstance(x, DynamicalState) else DynamicalState(state=x)
n_samples, device = ds.state.shape[0], ds.state.device
# sample uniform distribution c ∈ [a, b]
if c is None:
if seed is not None: torch.manual_seed(seed)
c = torch.FloatTensor(n_samples).uniform_(self.a, self.b)[:,None].to(device)
else:
c = c*torch.ones(n_samples, 1)
if perturb_state:
# sample gaussian noise ν ∈ 𝓝(0, I*c)
if seed is not None: torch.manual_seed(seed)
nu = torch.randn(n_samples, 3, device=device) * c
ds.state = ds.state + nu # perturb datapoint
# scale c so that it matches [-1,+1] interval of points
scale_c = 2*((c - self.a) / (1.e-10 + (self.b - self.a))) - 1
ds.condition = scale_c # store std as condition
return ds
# Region NormalisingFlow
def forward(self, ds, af_estimate=True):
assert hasattr(ds, 'condition')
ds = super().forward(ds)
ds = self.af1.dynamics.update_ds(ds, self.aug1(ds['state']))
ds = self.af1.forward(ds, estimate_trace=af_estimate)
return ds
def inverse(self, ds, af_estimate=True):
assert hasattr(ds, 'condition')
ds = self.af1.dynamics.update_ds(ds, self.aug1(ds['state']))
ds = self.af1.inverse(ds, estimate_trace=af_estimate)
ds = super().inverse(ds)
return ds
# Region GenerativeModel
def encode(self, X, c, seed=None):
if not isinstance(c, torch.Tensor):
c = torch.tensor([c], dtype=torch.float)
ds = DynamicalState(state=X)
ds = self.noise_enhance_data(ds, c=c, seed=seed)
ds = self.inverse(ds)
return ds['state'].cpu().detach()
def decode(self, z, c, seed=None):
if not isinstance(c, torch.Tensor):
c = torch.tensor([c], dtype=torch.float)
ds = DynamicalState(state=z)
# do not add noise to the latent state, this can lead to problems during reconstruction
ds = self.noise_enhance_data(ds, c=c, seed=seed, perturb_state=False)
ds = self.forward(ds)
return ds['state'].cpu().detach()
def save(self, path):
torch.save(self, os.path.join(path, 'model.pt'))
def load(path):
return torch.load(os.path.join(path, 'model.pt'))
def save_exists(path):
return (
os.path.isfile(os.path.join(path, 'model.pt')))
def log_likelihood(self, x, c, seed=None):
if not isinstance(c, torch.Tensor):
c = torch.tensor([c], dtype=torch.float)
ds = DynamicalState(state=x)
ds = self.noise_enhance_data(ds, c=c, seed=seed)
ds = self.inverse(ds, af_estimate=False)
return ds.log_prob.cpu().detach()
def sample_posterior(self, n_samples, c, seed=None):
z = self.sample_prior(n_samples)
return self.decode(z, c, seed)
def fit_model(self, X, X_val=None, path=None):
start_time = time.time()
if path is None:
tb_logger = False
checkpoint_callback=False
else:
tb_logger = pl_loggers.TensorBoardLogger(path, version=0)
checkpoint_callback=True
trainer = pl.Trainer(
max_epochs=5000, gpus=1, logger=tb_logger,
checkpoint_callback=checkpoint_callback
)
trainer.fit(
self, train_dataloaders=X, val_dataloaders=X_val)
elapsed_time = time.time() - start_time
if path is not None:
with open(os.path.join(path, 'training_time.txt'), 'w') as f:
f.write(str(elapsed_time))
def training_step(self, batch, batch_idx):
x = batch[0]
lambda_e, lambda_n = 0.01, 0.01
# state=[x+nu|c]
ds_x_prime = self.noise_enhance_data(x)
# logp(z_t1) = logp(z_t0) - \int_0^1 - Tr ∂f/∂z(t)
ds_z = self.inverse(ds_x_prime, af_estimate=True)
# minimise negative log likelihood and energy
loss = (-ds_z.log_prob + lambda_e * ds_z.e[:, 0] + lambda_n * ds_z.n[:, 0]
).sum() / (x.shape[0]*x.shape[1])
self.log('train_loss', loss)
return {'loss': loss}
def validation_step(self, batch, batch_idx):
x = batch[0]
lambda_e, lambda_n = 0.01, 0.01
# state=[x+nu|c]
ds_x_prime = self.noise_enhance_data(x)
# logp(z_t1) = logp(z_t0) - \int_0^1 - Tr ∂f/∂z(t)
ds_z = self.inverse(ds_x_prime, af_estimate=True)
loss = (-ds_z.log_prob + lambda_e * ds_z.e[:, 0] + lambda_n * ds_z.n[:, 0]).sum(
) / (x.shape[0]*x.shape[1])
self.log('validation_loss', loss)
return {'val_loss': loss}
def configure_optimizers(self):
optimizer = torch.optim.Adam(self.parameters(), lr=1e-3)
return {
'optimizer': optimizer,
'lr_scheduler':
torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, min_lr=1e-8, factor=0.5, verbose=True,
patience=100
), 'monitor': 'train_loss'
}
def __str__(self):
return 'snf'
Experiment 1: swiss roll¶
import pyvista as pv
from pdmtut.datasets import SwissRoll
pv.set_plot_theme("document")
model_save_path = '../results/swiss_roll/snf'
if store_results:
result_save_path = '../results/swiss_roll/snf'
pv.set_jupyter_backend('None')
else:
pv.set_jupyter_backend('ipygany')
result_save_path = None
dataset = SwissRoll(n_samples=100**2, seed=11)
if load_models and NormalisingSoftAmbientFlows.save_exists(model_save_path):
model = NormalisingSoftAmbientFlows.load(model_save_path)
else:
model = NormalisingSoftAmbientFlows()
model.fit_model(
X=dataset.train_loader(batch_size=512),
X_val=dataset.validation_loader(batch_size=512),
path=result_save_path)
if store_results:
model.save(model_save_path)
model = model.eval()
%tensorboard --logdir ../results/swiss_roll/snf
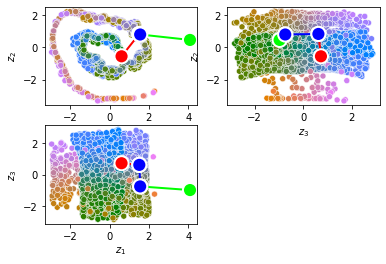
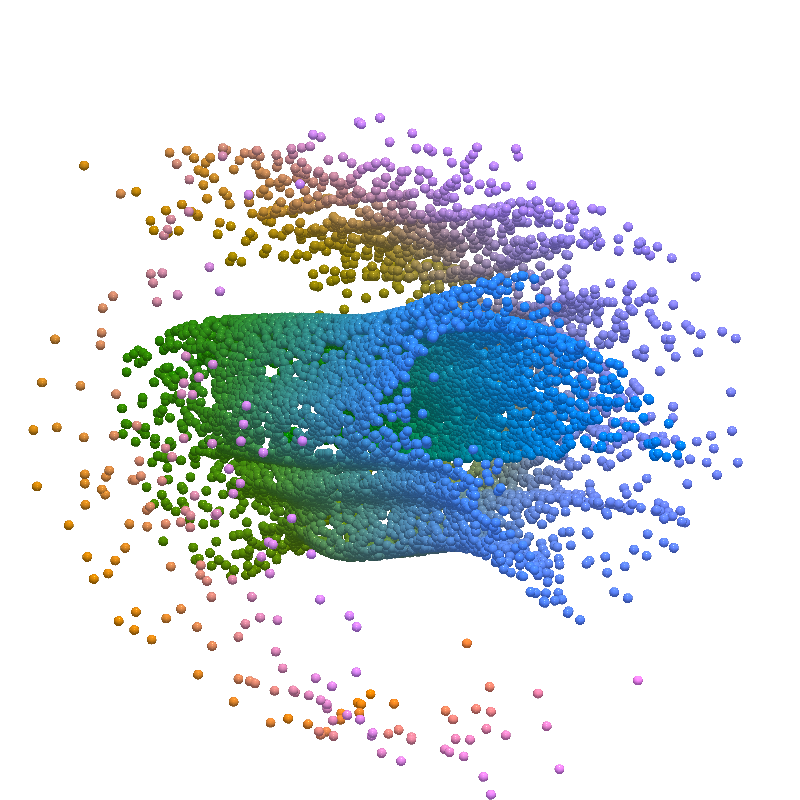
Input Representation¶
from pdmtut.vis import plot_representation
z = model.encode(dataset.X, c=0., seed=3)
z_extremes = model.encode(dataset.y_extremes, c=0., seed=3)
z_extremes = torch.cat([z_extremes, z_extremes[[1,2]]])
/home/bawaw/.conda/envs/pdm_tutorial/lib/python3.8/site-packages/torch/nn/functional.py:1795: UserWarning: nn.functional.tanh is deprecated. Use torch.tanh instead.
warnings.warn("nn.functional.tanh is deprecated. Use torch.tanh instead.")
plot_representation(z.numpy(), index_colors=dataset.index_colors, z_extremes=z_extremes, interpolate_background=True, root=result_save_path)
Input Reconstruction¶
from pdmtut.vis import plot_reconstruction
z = model.encode(dataset.X, c=0., seed=3)
x = model.decode(z, c=0., seed=3)
/home/bawaw/.conda/envs/pdm_tutorial/lib/python3.8/site-packages/torch/nn/functional.py:1795: UserWarning: nn.functional.tanh is deprecated. Use torch.tanh instead.
warnings.warn("nn.functional.tanh is deprecated. Use torch.tanh instead.")
mse = (dataset.unnormalise_scale(dataset.X) - dataset.unnormalise_scale(x)).pow(2).sum(-1).mean()
if result_save_path is not None:
with open(os.path.join(result_save_path, 'reconstruction.txt'), 'w') as f:
f.write(str(mse.item()))
mse
tensor(2.8050e-07)
plot_reconstruction(dataset.unnormalise_scale(x).numpy(), dataset.index_colors, root=result_save_path)
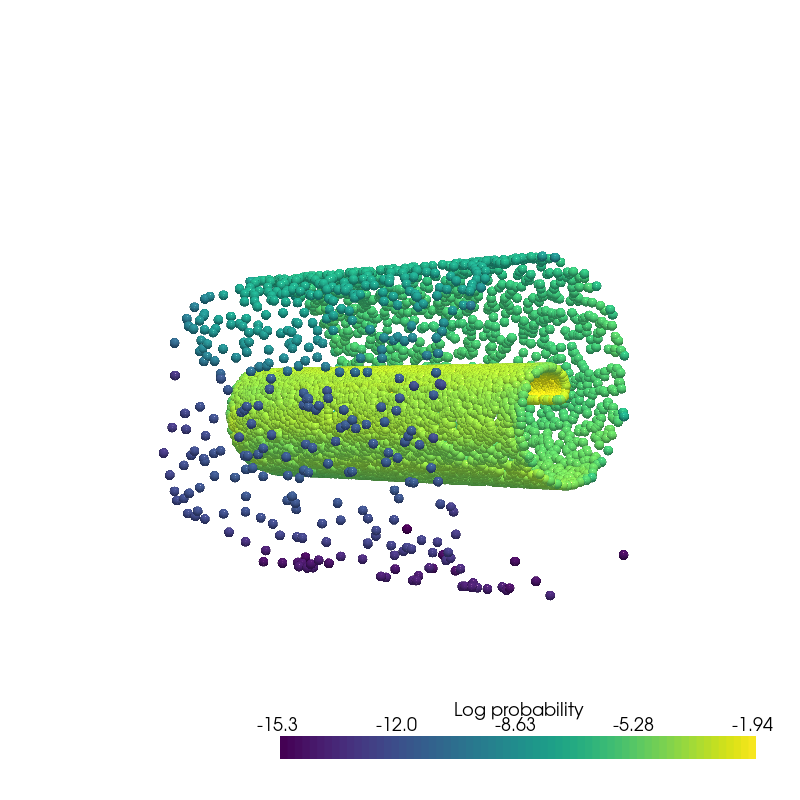
Density Estimation¶
from pdmtut.vis import plot_density
from regilib.core.invertible_modules.bijective import AffineTransform
log_likelihood = model.log_likelihood(dataset.X, c=0., seed=3)
# unnormalise the data and compute the change in density
un_normalise = AffineTransform(dataset._mean, 1/dataset._std)
data = un_normalise.forward(DynamicalState(state=dataset.X.clone().requires_grad_(True), log_prob=log_likelihood.clone()))
/home/bawaw/.conda/envs/pdm_tutorial/lib/python3.8/site-packages/torch/nn/functional.py:1795: UserWarning: nn.functional.tanh is deprecated. Use torch.tanh instead.
warnings.warn("nn.functional.tanh is deprecated. Use torch.tanh instead.")
data_log_likelihood = data.log_prob.mean()
if result_save_path is not None:
with open(os.path.join(result_save_path, 'density.txt'), 'w') as f:
f.write(str(data_log_likelihood.item()))
data_log_likelihood
tensor(-4.1334)
plot_density(data.state.detach().numpy(), data.log_prob.detach().numpy(), root=result_save_path)
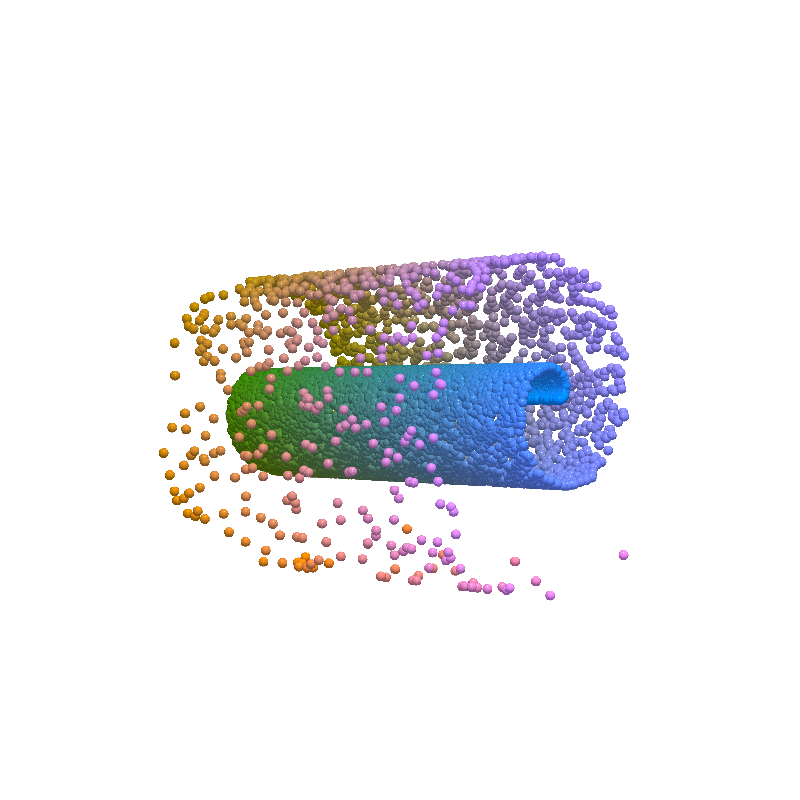
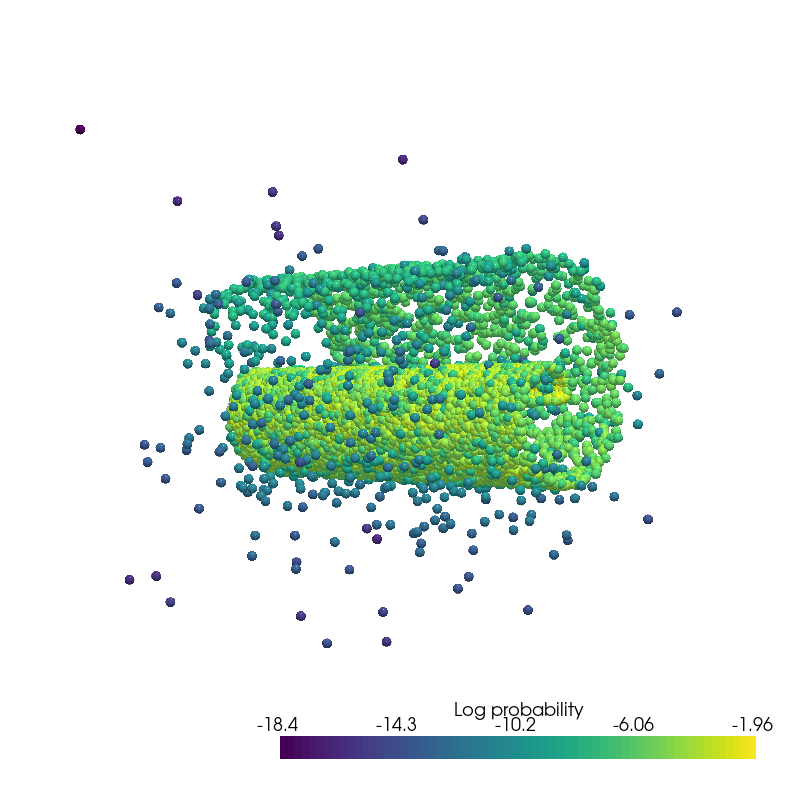
Generate Samples¶
from pdmtut.vis import plot_generated_samples
from regilib.core.invertible_modules.bijective import AffineTransform
generated_samples = model.sample_posterior(100**2, c=0., seed=3)
generated_samples_log_likelihood = model.log_likelihood(generated_samples, c=0., seed=3)
# unnormalise the data and compute the change in density
un_normalise = AffineTransform(dataset._mean, 1/dataset._std)
data = un_normalise.forward(DynamicalState(state=generated_samples.clone().requires_grad_(True), log_prob=generated_samples_log_likelihood.clone()))
plot_generated_samples(data.state.detach().numpy(), data.log_prob.detach().numpy(), root=result_save_path)
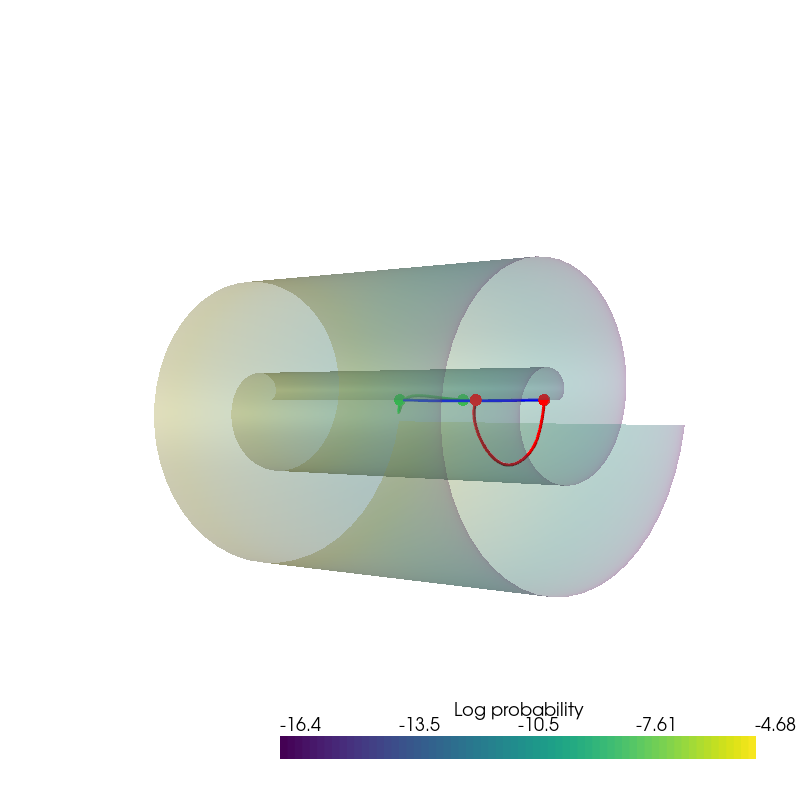
Interpolation¶
from pdmtut.vis import plot_interpolation
from scipy.interpolate import interp1d
z_extremes = model.encode(dataset.y_extremes, c=0., seed=3)
uniform_state, uniform_log_prob, _ = dataset.sample_points_uniformly(n_samples=100**2, seed=11)
linfit1 = interp1d([1,20], z_extremes[:2].numpy(), axis=0)
linfit2 = interp1d([1,20], z_extremes[2:].numpy(), axis=0)
linfit3 = interp1d([1,20], z_extremes[[1,2]].numpy(), axis=0)
interpolated_points_1 = model.decode(torch.Tensor(linfit1(np.arange(1,21))), c=0., seed=3)
interpolated_points_2 = model.decode(torch.Tensor(linfit2(np.arange(1,21))), c=0., seed=3)
interpolated_points_3 = model.decode(torch.Tensor(linfit3(np.arange(1,21))), c=0., seed=3)
/home/bawaw/.conda/envs/pdm_tutorial/lib/python3.8/site-packages/torch/functional.py:445: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at /opt/conda/conda-bld/pytorch_1639180588308/work/aten/src/ATen/native/TensorShape.cpp:2157.)
return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]
plot_interpolation(
dataset.unnormalise_scale(interpolated_points_1).numpy(),
dataset.unnormalise_scale(interpolated_points_2).numpy(),
dataset.unnormalise_scale(interpolated_points_3).numpy(),
uniform_state.detach().view(100, 100, 3).permute(2, 0, 1).numpy(),
uniform_log_prob.numpy(), root=result_save_path
)
Extra¶
Noisy generative samples¶
import pickle
import pyvista as pv
def plot_noisy_samples(c):
generated_samples = dataset.unnormalise_scale(
model.sample_posterior(100**2, c=c, seed=3)).numpy()
plotter = pv.Plotter()
plotter.add_mesh(
pv.PolyData(generated_samples),
render_points_as_spheres=True, point_size=10,
diffuse=0.99, specular=0.8, ambient=0.3, smooth_shading=True,
style='points'
)
plotter.camera_position = [(-65, 0, 65), (0, 0, 0), (0, 1, 0)]
_ = plotter.show(window_size=[800, 800])
if result_save_path is not None:
plotter.screenshot(os.path.join(
result_save_path, 'generated_samples_c_{}.png'.format(str(c).replace('.', '_'))))
for c in [0, 0.01, 0.05, 0.1, 0.2, 0.5]:
plot_noisy_samples(c)






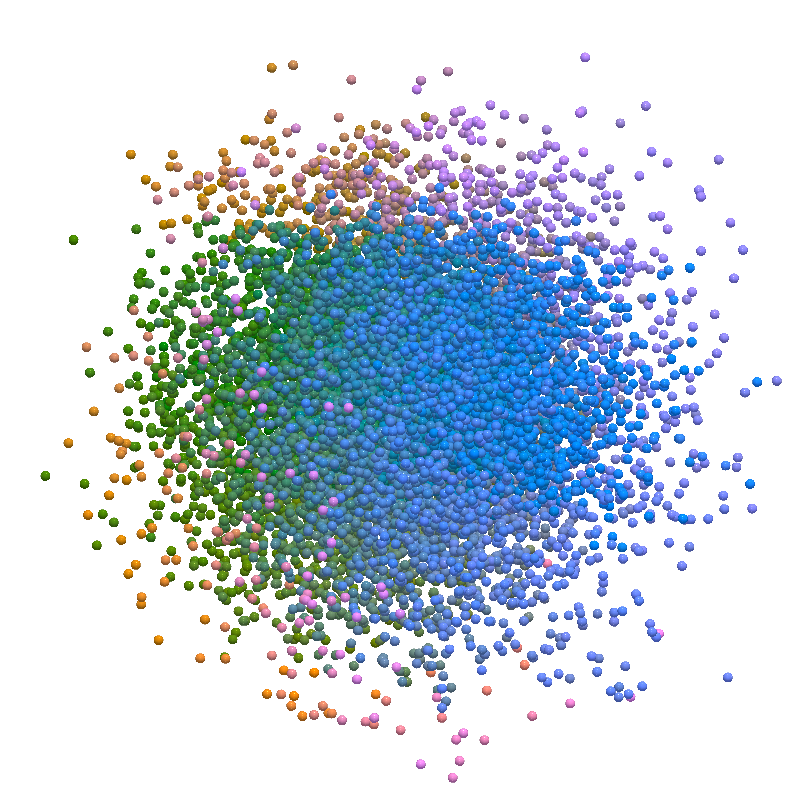
Input Representation (3D)¶
import pickle
import pyvista as pv
z = model.encode(dataset.X, c=0., seed=3)
plotter = pv.Plotter()
plotter.add_mesh(
pv.PolyData(z.detach().numpy()),
render_points_as_spheres=True, point_size=10,
diffuse=0.99, specular=0.8, ambient=0.3, smooth_shading=True,
scalars=dataset.index_colors,
style='points', rgb=True
)
plotter.camera_position = [(-10, 0, 10), (0, 0, 0), (0, 1, 0)]
_ = plotter.show(window_size=[800, 800])
if result_save_path is not None:
plotter.screenshot(os.path.join(result_save_path, '3d_base_representation.png'))
pickle.dump({
'reconstructed_state': z,
'index_colors': dataset.index_colors
}, open(os.path.join(result_save_path, '3d_base_representation.obj'), 'wb'))
Input Representation (3D - c=0.1)¶
import pickle
import pyvista as pv
z = model.encode(dataset.X, c=0.1, seed=3)
plotter = pv.Plotter()
plotter.add_mesh(
pv.PolyData(z.detach().numpy()),
render_points_as_spheres=True, point_size=10,
diffuse=0.99, specular=0.8, ambient=0.3, smooth_shading=True,
scalars=dataset.index_colors,
style='points', rgb=True
)
plotter.camera_position = [(-10, 0, 10), (0, 0, 0), (0, 1, 0)]
_ = plotter.show(window_size=[800, 800])
if result_save_path is not None:
plotter.screenshot(os.path.join(result_save_path, '3d_base_representation_c_01.png'))
pickle.dump({
'reconstructed_state': z,
'index_colors': dataset.index_colors
}, open(os.path.join(result_save_path, '3d_base_representation_c_01.obj'), 'wb'))